book:chap2:2.1_motivation_and_outline
2. Balancing Forces and Torques
- 2.1 Motivation and outline: forces are vectors
2.1 Motivation and outline: forces are vectors
In mechanics we use vectors to describe forces, displacements and velocities. A displacement describes the relative position of two points in space, and the velocity can be thought of as a distance divided by the time needed to go from the initial to the final point. (A mathematically more thorough definition will be given in Chapter 3.) For forces it is of paramount importance to indicate in which direction they are acting. Similarly, in contrast to speed, a velocity can not be specified in terms of a number with a unit, e.g. 5 m/s. By its very definition one also has to specify the direction of motion. Finally, also a displacement involves a length specification and a direction.
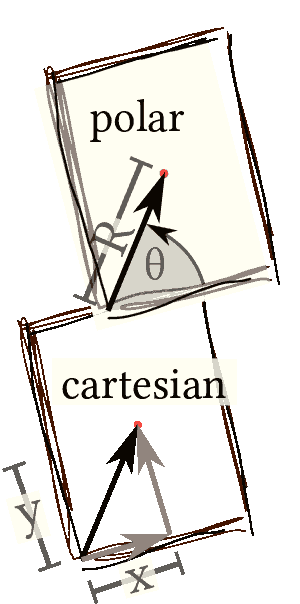
Figure 2.1: The displacement of the red point from the bottom left corner to the the middle of the page can either be specified by the direction $\theta$ and the distance $R$ (polar coordinates, top), or by the distances $x$ and $y$ along the sides of the paper (Cartesian coordinates, bottom).
Example 2.1 Displacement of a red dot from the lower left corner to the middle of a paper
This displacement is illustrated in Figure 2.1.
It can either be specified in terms of the distance $R$ of the point from the corner
and the angle $\theta$ of the line connecting the points and the lower edge of the paper
(i.e. the direction of the point).
Alternatively, it can be given in terms of two distances $(x,y)$
that refer to the length $x$ of a displacement along the edge of the paper
and a displacement $y$ in the direction vertical to the edge towards the paper.
This can be viewed as result of two subsequent displacements indicated by gray arrows.
In three dimensions, one has to adopt a third direction out of the plane used for the paper, and hence three numbers, to specify a displacements—or indeed any other vector.
\begin{align*} \begin{array}{l|lll} & \text{displacement} & \text{velocity} & \text{force} \\ & \mathbf x = (x_1, x_2, x_3) & \mathbf v = (v_1, v_2, v_3) & \mathbf F = (f_1, f_2, f_3) \\ \hline \text{unit} & [\mathbf x] = \text{m} & [\mathbf v] = \text{m/s} & [\mathbf F] = \text{kg m/s}^2 \\ \text{magnitude} & |\mathbf x| = \sqrt{ x_1^2 + x_2^2 + x_3^2 } & |\mathbf v| = \sqrt{ v_1^2 + v_2^2 + v_3^2 } & |\mathbf F| = \sqrt{ f_1^2 + f_2^2 + f_3^2 } \\ \text{direction} & \hat{\boldsymbol x} = \mathbf x / |\mathbf x| & \hat{\boldsymbol v} = \mathbf v / |\mathbf v| & \hat{\boldsymbol F} = \mathbf F / |\mathbf F| \end{array} \end{align*}
A basic introduction of mechanics can be given based on this heuristic account of vectors. However, for the thorough exposition that serve as a foundation of theoretical physics a more profound mathematical understanding of vectors is crucial. Hence, a large part of this chapter will be devoted to mathematical concepts.
Outline
In the first part of this chapter we introduce the mathematical notions of sets and groups that are needed to provide a mathematically sound definition of a vector space. Sets are the most fundamental structure of mathematics. It denotes a collection of elements, e.g., numbers like the digits of our number system $\{1, 2, \dots, 9\}$ or the set of students in my class. Mathematical structures refer to sets where the elements obey certain additional properties, like in groups and vector spaces. They are expressed in terms of operations that take one or several elements of the set, and return a result that may or may not be part of the given set. When an operation $f$ takes an element of a set $A$ and returns another element of $A$ we write $f : A \to A$. When an operation $\circ$ takes two elements of a set $A$ and returns a single element of $A$ we write 1) $\circ : A \times A \to A$. Equipped with the mathematical tool of vectors we will explore the physical concepts of forces and torques, and how they are balanced in systems at rest.
1)
Here $A \times A$ is the set, $(a_1, a_2)$, of all pairs of elements $a_1, a_2 \in A$.
Further details will be given in Definition 2.3 below.
book/chap2/2.1_motivation_and_outline.txt · Last modified: 2022/04/01 19:59 by jv